Как строят роботов. Как сделать робота в домашних условиях: пошаговый план действий
Хотели ли вы когда-нибудь построить боевого робота? Вы вероятно думали, что это слишком дорого и опасно. Тем не менее, большинство соревнований боевых роботов имеют весовую категорию 150 грамм, включая RobotWars. Этот класс в большинстве стран называется "Antweight" (англ. – муравьиный вес) и "FairyWeight" (англ. – вес как у феи) – в США. Они намного дешевле больших боевых роботов и не такие опасные. Поэтому они идеально подходят для новичков в деле боевых роботов. Эта статья расскажет вам как спроектировать и построить боевого робота класса Antweight.
ПРИМЕЧАНИЕ : Эта статья подразумевает, что вы уже читали и строили простого радиоуправляемого робота. Если нет, вернитесь исначала сделайте его. Следует отметить, что эта статья не является рекомендацией использования определенной части вашего робота. Это необходимо для поощрения творчества и разнообразия среди роботов.
Шаги
- Выберите сервопривод. Обычно для начинающих классаAntweight рекомендуется использовать сервопривод вместо мотора, так как с помощью сервопривода вам не потребуется контроллер скорости, который сохранит вам деньги и немного веса для вашего робота. Вам стоит искать "микро" сервоприводы, так как они сохранят вам много веса. Удостоверьтесь, что сервопривод "является" 360-модифицируемым. Для боевых роботов рекомендуется брать сервопривод с высоким моментом вращения вместо высокой скорости, чтобы было легче сталкивать других роботов, даже если у вас другое оружие. Сервопривод можно купить
- Если вы не можете найти сервопривод, идеально подходящий вашим требованиям, просмотрите другой раздел сайта, в котором продаются сервоприводы "Futaba". Futaba – это другая торговая марка, выпускающая сервоприводы. Иногда они имеют другие размеры, чем сервоприводы торговой марки HiTec.
- Выберите мотор для оружия. Если у вас активное оружие (к примеру, не "pusher"), тогда вам, вероятно, понадобится мотор, чтобы оружие двигалось. Если у вас есть оружие, которое должно двигаться действительно быстро (к примеру, вращающееся оружие), тогда вам стоит экипироваться мотором DC (бесщеточный обычно работает лучше, но со щетками тоже будет работать) с контроллером скорости. Не рекомендуется использовать вращающееся оружие для вашего первого робота класса antweight, так как его сложно построить и правильно сбалансировать. Тем не менее, если вы хотите сделать переворачивающее оружие, то вам понадобится сервопривод. Рекомендуется приобрести микросервопривод с особенно высоким моментом вращения, чтобы он мог с легкостью перевернуть другого робота. Ещё она вещь, на которую стоит обратить внимание при выборе сервопривода для оружия – это тип шестеренок. Если вы используете нейлоновые шестерни, а мотор испытывает большие нагрузки, шестерни могут растянуться со временем. Потарайтесь выбрать более выносливые шестерни из металла.
- Выберите колеса. Кода выбираете колеса, помните правило, что робот должен вмещаться в куб 4"X4"X4". Это значит, что у вашего робота должны быть колеса меньшего диаметра. Рекомендуется использовать колеса диаметром 2". Удостоверьтесь, что колеса могут быть легко установлены к сервоприводу и защищены. Ещё одна отличная техника, используемая у боевых роботов любого размера, возможность ездить вверх ногами. Да, управление будет немного обратным, но вы можете предотвратить проигрыш в соревновании за обездвиживание. Для этого сделайте вашего робота ниже ваших колес, чтобы он мог ездить вверх ногами. Вы можете приобрести колеса
- Выберите приемник/передатчик. При покупке приемника, убедитесь в том, что он "отказоустойчив". Это обязательное правило в большинстве соревнований и безопасности. Приемник AR500не имеет этой черты. Вам нужно будет купить приемник для бота BR6000, или другой приемник с отказоустойчивостью. В качестве передатчика рекомендуется использовать SpektrumDX5e. Если вы построили робота на дистанционном управлении из предыдущей статьи на wikiHow, вы можете снова использовать этот передатчик, но вам придется купить новый приемник.
- Выберите батарею. Настоятельно рекомендуется приобрести LiPo-батарею вместо NiHM-батареи. LiPo-батареи легче. Тем не менее, они более опасны, дороги и требуют особое зарядное устройство. Вложите деньги в LiPo-батарею и зарядное устройство, чтобы сэкономить в весе.
- Выберите материал. Материал, из которого сделаны шасси и броня боевого робота, очень важен, так как он укрывает от проколов вражеским оружием ваши электрические компоненты. Существует три варианта выбора: (заметка: вариантов больше, но эти три наиболее подходят для этой весовой категории) алюминий, титан и поликарбонат. Алюминий легкий и прочный, но может быть дорогим и тяжелым в резке. Плюс, он может быть совсем не 1 мм в толщину. Титан легкий и очень прочный, но его тяжело разрезать, и он очень дорог. И к нему также относится правило 1 мм толщины. Поликарбонат, или лексан, легкий, недорогой, легко режущийся, безосколочный, прочный пластик, который иногда используют в защите от пуль. Поликарбонат ещё и пластик, поэтому может быть любой толщины, но рекомендуется использовать толщиной в 1 мм. Настоятельно рекомендуется использовать поликарбонат. Он настолько же прочен, как и пластик, из которого изготовлены стены на арене соревнований класса antweight. Во время покупки удостоверьтесь, что взяли чуть больше, на случай, если вы промахнулись с расчетами. Все эти материалы можно купить
-
Соберите характеристики. Теперь, когда вы выбрали все детали, вам нужно снять размеры и вес. Они должны быть указаны на вебсайте, на котором вы их покупали. Переведите все значения в дюймах в миллиметры, используя конвертер. Запишите характеристики (в мм) всех ваших деталей на лист бумаги. Теперь, переведите значения веса (унции, фунты) в граммы, используя конвертер. Запишите весовые характеристики на бумаге.
Запроектируйте . Вы хотите, чтобы проект был точным, насколько это возможно. Это значит, что вам стоит попробовать сделать 3D-проект на компьютере, чем 2D-проект на бумаге. Тем не менее, 3D-проект не должен выглядеть сложно. Простой проект из призм и цилиндров подойдет.
- Суммируйте вес всех деталей (в граммах) и убедитесь, что сумма будет меньше 150 грамм.
- Если у вас нет САПР, скачайте бесплатную версию Sketchup.
- Изучите основы Sketchup с помощью бесплатных уроков.
- Создайте все детали, которые будете использовать, в Sketchup с записанными ранее размерами.
- Разработайте ваш шасси и броню. Удостоверьтесь, что сделали её меньше 4X4X4 дюймов.
- Поместите все компоненты в 3D-модельшасси/брони, чтобы увидеть, подходят ли они. Это поможет вам решить, где будут расположены компоненты.
-
Закажите ваши детали. Если все ваши компоненты безупречно подошли к вашему дизайну, заказывайте детали. Если нет, выберите новые детали.
Соберите его. Теперь вам нужно собрать ваши шасси/броню. Поставьте все ваши компоненты на места, предусмотренные в вашем проекте. Подсоедините все и протестируйте. Вы должны попробовать собрать все так, чтобы можно было легко вынуть компоненты, если им потребуется замена. А компонентам будет требоваться замена чаще, чем у обычного робота, так как этот робот будет сражаться. Атакующие роботы могут повредить вашего. Рекомендуется использовать липучую ленту (Velcro), чтобы хранить детали.
Практикуйтесь в управлении. Неважно, насколько хорош ваш робот, если вы упадете, вы проиграли. Прежде чем даже думать о соревнованиях, вам нужно попрактиковаться в управлении. Используйте перевернутые чашки как конусы и объезжайте их.Используйте пенопласт в качестве целей и атакуйте его (попробуйте сделать это на маленьком столе, чтобы попрактиковаться в сталкивании, и попытаться не упасть самому). Можете даже купить дешевую радиоуправляемую машину (на другой частоте с вашим роботом), попросить другого человека управлять ей, и попытаться столкнуть или уничтожить машину, не свалившись. Если вы знаете другого человека с роботом класса Antweight, устройте дружественные поединки вместе с ним (если возможно, замените вращающееся оружие на менее деструктивное пластиковое).
-
Соревнуйтесь. Найдите соревнования в вашей зоне и развлекайтесь, разрушая других роботов! Помните, что если вы собираетесь соревноваться в США, вам стоит искать соревнования класса Fairyweight, а не Antweight.
- Если вы хотите, чтобы ваш робот мог бить, желательно присоединить сервопривод к сферическому "плечу", и иметь руку, установленную под углом 90 градусов, чтобы делать апперкоты.
- Ваш робот будет более оборонительным или нападающим? Так как вес ограничен, вы можете захотеть использовать большую его часть на оружие или броню. Постарайтесь сбалансировать эти характеристики на вашем первом роботе.
- Любого робота можно улучшить. Просто потому, что ваша первая модель робота не работает, не стоит её полностью выбрасывать. Возможно вам просто нужно заменить мотор. Даже если у вас полностью функционирующий робот, вы все ещё можете его улучшить. Посмотрите на моторы, которые больше подходят вашим целям, если новый мотор не используется в проекте, просто оставьте его и у вас будет возможность собрать другого робота. Постарайтесь улучшить некоторые части (обычно перед, зад и оружие) брони в алюминий, или даже титан, для большей "защиты от вертушек".
- Помните, что вы можете поместить вашего робота в куб по диагонали.
- Закажите запасные детали для вашего робота. Так как это боевой робот, ваши детали могут повредится в сражении. Если у вас есть запасные на руках, вы сможете быстрее заменить детали.
В правилах говорится, что робот должен поместится в куб 4X4X4 дюйма, тем не менее он может расширятся с помощью дистанционного управления. Вы можете извлечь из этого выгоду. К примеру, ваше переворачивающее оружие слишком выпирает. Постарайтесь разработать его так, чтобы flipper мог подняться прямо вверх и быть меньше четырех дюймов в высоту. Но когда flipper опускается (после того как куб поднят), длина станет больше четырех дюймов.
- После постройки своего первого робота и четкого понимания боевых роботов, постарайтесь построить ещё одного. Но, на этот раз, будьте уникальным . Постарайтесь сделать его не таким, как роботы у других людей в этой весовой категории. Если вы действительно амбициозны, вы можете попробовать сделать летающего робота! Летающие роботы допускаются правилами, но их редко строят.
- Если вы используете SketchUp, вы можете найти идеальные модели сервоприводов и других компонентов на Warehouse. Просто ищите название сервопривода (или компонента, который хотите) и смотрите, если что-то подойдет. Там есть не все, но то что вы найдете, обычно выглядит лучше и даст вам более аккуратную модель. Удостоверьтесь, что модель, которую вы нашли, того же размера, что и настоящая деталь
- Если вы опытны в механике и боевых роботах, вы можете попробовать построить шагающего робота. Если вы сделаете боевого робота, который ходит, вы получите дополнительный вес для работы.
Предупреждения
- LiPo-батареиочень опасны. Не заряжайте их, используя зарядное устройство для NiHM или Nicad батарей.
- Даже микропневматика опасна. Если вы используете пневматику, следуйте технике безопасности.
- Боевые роботы даже такой величин могут быть опасными. Если вы используете вращающееся оружие, отходите, когда оперируете с ним. Выключайте его, когда работаете над оружием.
- Всегда носите защитные очки, когда режете материал или оперируете с роботом.
- Некоторые арены считаются небезопасными для вращающегося оружия. Не пытайтесь использовать вращающееся оружие на таких аренах.
- LiPo-батареи могут воспламенится, если будут пробиты. Когда проектируете робота, постарайтесь расположить батарею в то место, которое не проткнут. Если батарея загорелась, правила гласят, что вы не можете касаться робота, пока он горит. У вас не будет возможности достать его, что значит все другие компоненты могут быть разрушены. Защищайте батарею, как будто это сердце робота!
Разберитесь в правилах. До того, как проектировать робота для соревнований, вы должны понимать все правила. Их можно найти Наиболее важное правило сборки, за которым нужно следить, это требования к размеру/весу (4"X4"X4" 150 грамм), и правило металлической брони, в котором говорится, что нельзя иметь броню больше 1 мм толщиной.
Какое оружие вы будете использовать? Важной частью боевого робота является оружие. Придумайте идею оружия, но удостоверьтесь, что не выйдете за рамки правил. Для вашего первого бота класса antweight настоятельно рекомендуется использовать "flipper" (англ. – переворачиватель) или даже "pusher" (англ. – тот, кто толкает). Переворачивающее оружие, если правильно разработано, может быть наиболее эффективным оружием в классе Antweight. Толкающее оружие – самое простое, так как не является двигающимся оружием. Весь робот действует, как оружие, и сталкивает роботов вокруг. Это эффективно, так как правила гласят, что половина арены должна быть без стен. Вы сможете вытолкнуть другого робота из арены.
Выберите ваши детали. Да, вам нужно выбрать ваши детали до проектирования. Тем не менее, не покупайте их. Пока. Просто выберите детали и соответствующий проект. Если что-нибудь не подойдет или не будет работать, пока вы проектируете, вы сохраните деньги, так как ещё сможете заменить детали. И снова, не покупайте пока что детали!
Кому не хотелось бы иметь универсального помощника, готового выполнить любое поручение: помыть посуду, закупить продуктов, поменять колесо в автомобиле, да и отвезти детей в сад, а родителей на работу? Идея создания механизированных ассистентов занимает инженерные умы ещё с древних времён. А Карел Чапек даже придумал слово, обозначающее механического слугу – робота, выполняющего обязанности вместо человека.
К счастью, в нынешнем цифровом веке, такие помощники наверняка вскоре станут реальностью. На самом деле, интеллектуальные механизмы уже помогают человеку в выполнении домашних дел: робот-пылесос уберётся, пока хозяева на работе, мультиварка поможет приготовить еду, не хуже скатерти-самобранки, а игривый щенок Айбо радостно принесёт тапочки или мяч. Сложные роботы используются на производстве, в медицине и космосе. Они позволяют частично, а то и полностью, заменить труд человека в сложных или опасных условиях. Андроиды при этом пытаются внешне походить на людей, тогда как промышленные роботы обычно создаются из экономических и технологических соображений и внешний декор у них отнюдь не в приоритете.
Но, оказывается, можно попытаться сделать робота с помощью подручных средств. Так, можно сконструировать оригинальный механизм из телефонной трубки, компьютерной мышки, зубной щётки, старого фотоаппарата или вездесущей пластиковой бутылки. Разместив на платформе несколько датчиков, можно запрограммировать такого робота на выполнение простых операций: регулировку освещённости, подачу сигналов, движение по комнате. Конечно, это далеко не многофункциональный помощник из фантастических фильмов, зато такое занятие развивает изобретательность и творческое инженерное мышление, и безоговорочно вызывает восхищение у тех, кто считает роботостроение абсолютно не кустарным делом.

Киборг из коробки
Одно из самых простых решений на пути к тому, чтобы сделать робота – приобрести готовый набор для робототехники с пошаговым руководством. Этот вариант подойдёт также тем, кто собирается серьёзно заниматься техническим творчеством, ведь в одном пакете находятся все необходимые детали для механики: от электронных плат и специализированных датчиков, до запаса болтиков и наклеек. Вместе с инструкциями, позволяющими создать довольно сложный механизм. Благодаря множеству аксессуаров такой робот может послужить отличной базой для творчества.
Основных школьных знаний по физике и навыков с уроков труда вполне достаточно для сборки первого робота. Разнообразные сенсоры и моторы подчиняются пультам управления, а специальные среды программирования позволяют создать настоящих киборгов, умеющих выполнять команды.
Например, датчик механического робота может фиксировать наличие или отсутствие поверхности перед прибором, а программный код указывать, в какую сторону следует поворачивать колёсную базу. Такой робот ни за что не упадёт со стола! Кстати, по схожему принципу работают настоящие роботы-пылесосы. Помимо проведения уборки по заданному расписанию и умения вовремя возвращаться на базу для подзарядки, этот интеллектуальный помощник может самостоятельно строить траектории уборки помещения. Поскольку на полу могут располагаться разнообразные препятствия, такие как стулья и провода, роботу приходится постоянно сканировать предлежащий путь и огибать такие помехи.
Для того чтобы собственноручно созданный робот умел выполнять различные команды, производители предусматривают возможность его программирования. Составив алгоритм поведения робота в различных условиях, следует создать код взаимодействия датчиков с окружающим миром. Это осуществимо благодаря наличию микрокомпьютера, являющегося мозговым центром такого механического робота.

Мобильный механизм собственного изготовления
Даже без специализированных, и обычно дорогостоящих, наборов, вполне возможно сделать механический манипулятор подручными средствами. Итак, загоревшись замыслом создания робота, следует внимательно проанализировать запасы домашних закромов на предмет наличия невостребованных запчастей, которые могут быть использованы в этой творческой затее. В ход пойдут:
- моторчик (например, от старой игрушки);
- колёса от игрушечных автомобилей;
- детали конструкторов;
- картонные коробки;
- стержни авторучек;
- скотч разных видов;
- клей;
- пуговицы, бусинки;
- винтики, гайки, скрепки;
- всевозможные провода;
- лампочки;
- батарейка (подходящая моторчику по напряжению).
Совет: «Нелишним навыком при создании робота будет умение обращаться с паяльником, ведь он поможет надёжно скрепить механизм, в особенности электрические компоненты».

С помощью этих общедоступных составляющих можно сотворить настоящее техническое чудо.
Итак, для того чтобы сделать собственного робота из доступных в домашних условиях материалов, следует:
- подготовить найденные детали для механизма, проверить их работоспособность;
- нарисовать макет будущего робота, учитывая наличное оборудование;
- сложить корпус для робота из конструктора или картонных деталей;
- приклеить или спаять запчасти, отвечающие за движение механизма (например, скрепить моторчик робота с колёсной базой);
- обеспечить электропитание мотора, присоединив его проводником к соответствующим контактам батарейки;
- дополнить тематический декор прибора.
Совет: «Бусинки глаз для робота, декоративные рожки-усики из проволоки, ножки-пружинки, диодные лампочки помогут одушевить даже самый скучный механизм. Эти элементы можно крепить при помощи клея или скотча».
Сделать механизм такого робота можно за несколько часов, после чего остаётся придумать роботу имя и представить восхищенным зрителям. Наверняка некоторые из них подхватят новаторскую задумку и смогут смастерить собственных механических персонажей.
Известные умные автоматы
 Милый робот Валл-И располагает к себе зрителя одноимённого фильма, заставляя сопереживать его драматическим приключениям, тогда как Терминатор демонстрирует мощь бездушной непобедимой машины. Персонажи Звёздных войн – верные дроиды R2D2 и C3PO, сопровождают в путешествиях по далёкой-далёкой Галактике, а романтический Вертер даже жертвует собой в схватке с космическими пиратами.
Милый робот Валл-И располагает к себе зрителя одноимённого фильма, заставляя сопереживать его драматическим приключениям, тогда как Терминатор демонстрирует мощь бездушной непобедимой машины. Персонажи Звёздных войн – верные дроиды R2D2 и C3PO, сопровождают в путешествиях по далёкой-далёкой Галактике, а романтический Вертер даже жертвует собой в схватке с космическими пиратами.
За пределами кинематографа также существуют механические роботы. Так, мир восхищается умениями робота-гуманоида Асимо, который умеет ходить по лестнице, играть в футбол, подавать напитки и вежливо здороваться. Марсоходы Спирит и Кьюриосити оборудованы автономными химическими лабораториями, позволившими сделать анализ образцов марсианских почв. Беспилотные автомобили-роботы могут передвигаться без участия человека, даже по сложным городским улицам с высокими рисками непредвиденных событий.
Возможно, именно из домашних проб создания первых интеллектуальных механизмов, вырастут изобретения, которые изменят техническую панораму будущего и жизнь человечества.
Сделать робота очень просто Давайте разберемся, что же потребуется чтобы создать робота в домашних условиях, для того чтобы понять основы робототехники .
Наверняка, насмотревшись фильмов про роботов, тебе не раз хотелось построить своего боевого товарища, но ты не знал с чего начать. Конечно, у тебя не получится построить двуногого терминатора, но мы и не стремимся к этому. Собрать простого робота может любой, кто умеет правильно держать паяльник в руках и для этого не нужно глубоких знаний, хотя они и не помешают. Любительское роботостроение мало чем отличается от схемотехники, только гораздо интереснее, потому что тут так же затронуты такие области, как механика и программирование. Все компоненты легкодоступны и стоят не так уж и дорого. Так что прогресс не стоит на месте, и мы будем его использовать в свою пользу.
Введение
Итак. Что же такое робот? В большинстве случаев это автоматическое устройство, которое реагирует на какие-либо действия окружающей среды. Роботы могут управляться человеком или выполнять заранее запрограммированные действия. Обычно на роботе располагают разнообразные датчики (расстояния, угла поворота, ускорения), видеокамеры, манипуляторы. Электронная часть робота состоит из микроконтроллера (МК) - микросхема, в которую заключён процессор, тактовый генератор, различная периферия, оперативная и постоянная память. В мире существует огромное количество разнообразных микроконтроллеров для разных областей применения и на их основе можно собирать мощных роботов. Для любительских построек широкое применение нашли микроконтроллеры AVR. Они, на сегодняшний день, самые доступные и в интернете можно найти много примеров на основе этих МК. Чтобы работать с микроконтроллерами тебе нужно уметь программировать на ассемблере или на Cи и иметь начальные знания в цифровой и аналоговой электронике. В нашем проекте мы будем использовать Cи. Программирование для МК мало чем отличается от программирования на компьютере, синтаксис языка такой же, большинство функций практически ничем не отличаются, а новые довольно легко освоить и ими удобно пользоваться.
Что нам нужно
Для начала наш робот будет уметь просто объезжать препятствия, то есть повторять нормальное поведение большинства животных в природе. Всё что нам потребуется для постройки такого робота можно будет найти в радиотехнических магазинах. Решим, как наш робот будет передвигаться. Самым удачным я считаю гусеницы, которые применяются в танках, это наиболее удобное решение, потому что гусеницы имеют большую проходимость, чем колёса машины и ими удобнее управлять (для поворота достаточно вращать гусеницы в разные стороны). Поэтому тебе понадобится любой игрушечный танк, у которого гусеницы вращаются независимо друг от друга, такой можно купить в любом магазине игрушек по разумной цене. От этого танка тебе понадобится только платформа с гусеницами и моторы с редукторами, остальное ты можешь смело открутить и выкинуть. Так же нам потребуется микроконтроллер, мой выбор пал на ATmega16 - у него достаточно портов для подключения датчиков и периферии и вообще он довольно удобный. Ещё тебе потребуется закупить немного радиодеталей, паяльник, мультиметр.
Делаем плату с МК
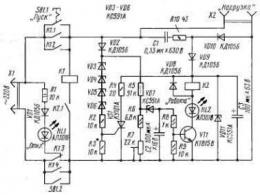
В нашем случае микроконтроллер будет выполнять функции мозга, но начнём мы не с него, а с питания мозга робота. Правильное питание - залог здоровья, поэтому мы начнём с того, как правильно кормить нашего робота, потому что на этом обычно ошибаются начинающие роботостроители. А для того, чтобы наш робот работал нормально нужно использовать стабилизатор напряжения. Я предпочитаю микросхему L7805 - она предназначена, чтобы на выходе выдавать стабильное напряжение 5В, которое и нужно нашему микроконтроллеру. Но из-за того, что падение напряжения на этой микросхеме составляет порядка 2,5В к нему нужно подавать минимум 7,5В. Вместе с этим стабилизатором используются электролитические конденсаторы, чтобы сгладить пульсации напряжения и в цепь обязательно включают диод, для защиты от переполюсовки.
Теперь мы можем заняться нашим микроконтроллером. Корпус у МК — DIP (так удобнее паять) и имеет сорок выводов. На борту имеется АЦП, ШИМ, USART и много другого, что мы пока использовать не будем. Рассмотрим несколько важных узлов. Вывод RESET (9-ая нога МК) подтянут резистором R1 к «плюсу» источника питания - это нужно делать обязательно! Иначе твой МК может непреднамеренно сбрасываться или, проще говоря - глючить. Так же желательной мерой, но не обязательной является подключение RESET’а через керамический конденсатор C1 к «земле». На схеме ты так же можешь увидеть электролит на 1000 мкФ, он спасает от провалов напряжения при работе двигателей, что тоже благоприятно скажется на работе микроконтроллера. Кварцевый резонатор X1 и конденсаторы C2, C3 нужно располагать как можно ближе к выводам XTAL1 и XTAL2.
О том, как прошивать МК, я рассказывать не буду, так как об этом можно прочитать в интернете. Писать программу мы будем на Cи, в качестве среды программирования я выбрал CodeVisionAVR. Это довольно удобная среда и полезна новичкам, потому что имеет встроенный мастер создания кода.

Управление двигателями
Не менее важным компонентом в нашем роботе является драйвер двигателей, который облегчает нам задачу в управлении им. Никогда и ни в коем случае нельзя подключать двигатели напрямую к МК! Вообще мощными нагрузками нельзя управлять с микроконтроллера напрямую, иначе он сгорит. Пользуйтесь ключевыми транзисторами. Для нашего случая есть специальная микросхема - L293D. В подобных несложных проектах всегда старайтесь использовать именно эту микросхему с индексом «D», так как она имеет встроенные диоды для защиты от перегрузок. Этой микросхемой очень легко управлять и её просто достать в радиотехнических магазинах. Она выпускается в двух корпусах DIP и SOIC. Мы будем использовать в корпусе DIP из-за удобства монтажа на плате. L293D имеет раздельное питание двигателей и логики. Поэтому саму микросхему мы будем питать от стабилизатора (вход VSS), а двигатели напрямую от аккумуляторов (вход VS). L293D выдерживает нагрузку 600 мА на каждый канал, а этих каналов у неё два, то есть к одной микросхеме можно подключить два двигателя. Но, чтобы перестраховаться, мы объединим каналы, и тогда потребуется по одной микре на каждый двигатель. Отсюда следует, что L293D сможет выдержать 1.2 А. Чтобы этого добиться нужно объединить ноги микры, как показано на схеме. Микросхема работает следующим образом: когда на IN1 и IN2 подаётся логический «0», а на IN3 и IN4 логическая единица, то двигатель вращается в одну сторону, а если инвертировать сигналы - подать логический ноль, тогда двигатель начнёт вращаться в другую сторону. Выводы EN1 и EN2 отвечают за включение каждого канала. Их мы соединяем и подключаем к «плюсу» питания от стабилизатора. Так как микросхема греется во время работы, а установка радиаторов проблематична на этот тип корпуса, то отвод тепла обеспечивается ногами GND — их лучше распаивать на широкой контактной площадке. Вот и всё, что на первое время тебе нужно знать о драйверах двигателей.
Датчики препятствий
Чтобы наш робот мог ориентироваться и не врезался во всё, мы установим на него два инфракрасных датчика. Самый простейший датчик состоит из ик-диода, который излучает в инфракрасном спектре и фототранзистор, который будет принимать сигнал с ик-диода. Принцип такой: когда перед датчиком нет преграды, то ик-лучи не попадают на фототранзистор и он не открывается. Если перед датчиком препятствие, тогда лучи от него отражаются и попадают на транзистор - он открывается и начинает течь ток. Недостаток таких датчиков в том, что они могут по-разному реагировать на различные поверхности и не защищены от помех — от посторонних сигналов других устройств датчик, случайно, может сработать. От помех может защитить модулирование сигнала, но пока мы этим заморачиватся не будем. Для начала, и этого хватит.

Прошивка робота
Чтобы оживить робота, для него нужно написать прошивку, то есть программу, которая бы снимала показания с датчиков и управляла двигателями. Моя программа наиболее проста, она не содержит сложных конструкций и всем будет понятна. Следующие две строки подключают заголовочные файлы для нашего микроконтроллера и команды для формирования задержек:
#include
#include
Следующие строки условные, потому что значения PORTC зависят от того, как ты подключил драйвер двигателей к своему микроконтроллеру:
PORTC.0 = 1;
PORTC.1 = 0;
PORTC.2 = 1;
PORTC.3 = 0;
Значение 0xFF означает, что на выходе будет лог. «1», а 0x00 - лог. «0».
Следующей конструкцией мы проверяем, есть ли перед роботом препятствие и с какой оно стороны:
if (!(PINB & (1< Если на фототранзистор попадает свет от ик-диода, то на ноге микроконтроллера устанавливается лог. «0» и робот начинает движение назад, чтобы отъехать от препятствия, потом разворачивается, чтобы снова не столкнуться с преградой и затем опять едет вперёд. Так как у нас два датчика, то мы проверяем наличие преграды два раза - справа и слева и потому можем узнать с какой стороны препятствие. Команда «delay_ms(1000)» указывает на то, что пройдёт одна секунда, прежде чем начнёт выполняться следующая команда. Я рассмотрел большинство аспектов, которые помогут тебе собрать твоего первого робота. Но на этом робототехника не заканчивается. Если ты соберёшь этого робота, то у тебя появится куча возможностей для его расширения. Можно усовершенствовать алгоритм робота, как например, что делать, если препятствие не с какой-то стороны, а прямо перед роботом. Так же не помешает установить энкодер - простое устройство, которое поможет точно располагать и знать расположение твоего робота в пространстве. Для наглядности возможна установка цветного или монохромного дисплея, который может показывать полезную информацию - уровень заряда аккумулятора, расстояние до препятствия, различную отладочную информацию. Не помешает и усовершенствование датчиков - установка TSOP (это ик-приёмники, которые воспринимают сигнал только определённой частоты) вместо обычных фототранзисторов. Помимо инфракрасных датчиков существуют ультразвуковые, стоят подороже, и тоже не лишены недостатков, но в последнее время набирают популярность у роботостроителей. Для того, чтобы робот мог реагировать на звук, было бы неплохо установить микрофоны с усилителем. Но по-настоящему интересным, я считаю, установка камеры и программирование на её основе машинного зрения. Есть набор специальных библиотек OpenCV, с помощью которых можно запрограммировать распознавание лиц, движения по цветным маякам и много всего интересного. Всё зависит только от твоей фантазии и умений. Список компонентов: ATmega16 в корпусе DIP-40> L7805 в корпусе TO-220 L293D в корпусе DIP-16 х2 шт. резисторы мощностью 0,25 Вт номиналами: 10 кОм х1 шт., 220 Ом х4 шт. конденсаторы керамические: 0.1 мкФ, 1 мкФ, 22 пФ конденсаторы электролитические: 1000 мкФ х 16 В, 220 мкФ х 16В х2 шт. диод 1N4001 или 1N4004 кварцевый резонатор на 16 МГц ИК-диоды: подойдут любые в количестве двух штук. фототранзисторы, тоже любые, но реагирующие только на длину волны ик-лучей Код прошивки: В данный момент мой робот практически завершён. На нём установлена беспроводная камера, датчик расстояния (и камера и этот датчик установлены на поворотной башне), датчик препятствия, энкодер, приёмник сигналов с пульта и интерфейс RS-232 для соединения с компьютером. Работает в двух режимах: автономном и ручном (принимает сигналы управления с пульта ДУ), камера также может включаться/выключаться дистанционно или самим роботом для экономии заряда батарей. Пишу прошивку для охраны квартиры (передача изображения на компьютер, обнаружение движений, объезд помещения). В 2015 году Т-800 выглядит как человек, победивший машину, скрывающуюся внутри. Схватка далась ему тяжело: он научился проговаривать вслух не очень ловкие шутки, потерял физическую подготовку и просто устал. Молодая Сара Коннор называет его папочкой, а новой фирменной фразой уставшего возвращаться Терминатора становится «Я не стар, я устарел» - с точки зрения корпорации Skynet и с позиций робототехники. Когда Кэмерон придумывал первого , а Стэн Уинстон собирал его буквально из подручных материалов, малоподвижный и пугающий Т-800 был провозвестником мрачного будущего, живо представлявшегося зрителям: не так давно кончилась холодная война, парниковый эффект и экологические катастрофы из повестки заседаний ООН выбрались в публичную сферу, а экономические провалы политики США взялись списывать и на технократическую демократию. Малоподвижный Т-800 с немигающим красным взором был воплощением всех этих угроз. В XXI веке пугающая привлекательность Терминатора уже не столь очевидна; публичные выступления на тему экологических катастроф все реже оказываются в новостной повестке; корпорациям все чаще удается побеждать свободную волю мыслящего индивида, просто помещая человека в условия тотального комфорта; а в желании построить боевого андроида не упрекнешь ни одну из держав (создание экзоскелетов и беспилотников не в счет, они совсем не похожи на людей). Но именно сейчас, когда пророческая сила творения Джеймса Кэмерона и Стэна Уинстона больше не действует, в поле робототехники и экспериментальной кибернетики доступны практически все составные детали Т-800. И пусть Джеймс Кэмерон и говорил, «мы можем построить такого робота, скорее, в 2029 году». Нейронная сеть
Нейросеть Google превращает обычные изображения в картины Николая Рериха, узнавая в силуэтах облаков птиц, людей и даже храмы.
Картезиански беспощадное сознание Терминатора заключено в самообучающемся компьютере, выстроенном по образу и подобию нейросети Skynet. У каждого Т-800 существует два режима работы: Hive и Rogue. В первом терминаторы синхронизируются с другими моделями и нейронным процессором Skynet, получая информацию от единой сети. Шаги в этом направлении делают сотрудники MIT, в 2014 году разработавшие программу совместного обучения для машин - чтобы несколько сервисных роботов делились полученными знаниями и могли обмениваться ими в любой момент. Во втором - в режиме «непослушания» - Т-800 переходит к процессу самообучения - и каждая его прогулка превращается в этнографическое путешествие. В этом режиме его сознание сталкивается, в соответствии с мифологией франшизы, с опасными вопросами и искушениями: зачем я существую, какой высшей цели я служу? Skynet охранял киборгов от таких, безусловно, важных вопросов при помощи «внутренних блокираторов» - их обошли повстанцы в «Терминаторе-2: Судный день» и сумели укротить Т-800. Главный претендентом на уровень осознанности Skynet является сеть, созданная учеными в лаборатории Google X. И, если Skynet хвастливо представляется «Мы Skynet, самый совершенный искусственный интеллект в пределах известной Вселенной», сеть Google X пока лишь занимается делом, приличествующим каждому ребенку: угадывает в очертаниях облаков привычные фигуры. Впервые представленная в 2012 году нейросеть, состоящая из 1000 компьютеров и 16 000 ядер, сама научилась распознавать кошек и человеческие лица, а в 2015 году настолько расширила библиотеку известных ей изображений и концептов, что смогла выявлять знакомые образы даже в цифровом шуме. Нейронная сеть Google продолжает заниматься самообучением и направлена на распознавание изображений - в отличие от Skynet, по официальной мифологии обретшего самосознание через три года после запуска в 1997 году и тогда же решившего, что пришло время для очистительной войны. Машинное зрение
Драматичное видео, на котором АR-600 узнает своих создателей и других людей
Машинное зрение неразрывно связано с познанием и обучением машин. Спасибо механизмам типа DeepFace, различающим лица друзей на фейсбуке даже на аппетитно снятых завтраках; а также Google Photos (хотя и они порой дают курьезные сбои), How-old.net от Microsoft и разработкам Стивена Вольфрама. Системы распознавания лиц используются в работе социальных и гражданских роботов - даже первый российский робот АР-600, отчаянно похожий на Валли, умеет распознавать людей (по крайней мере своих создателей). Аналогичное видение будет внедряться уже через несколько лет - DARPA
Но, если верить Джеймсу Кэмерону, разрешившему плоти Т-800 стареть, Терминатор относится к киборгам; в нем сочетаются механические детали с живыми тканями. А зрение киборгов устроено сложнее, чем видение роботов, - его разрабатывают и программисты, и робототехники, и специалисты по оптогенетике. Таких специалистов также поддерживает DARPA - агентство Пентагона, внедряющее в реальную жизнь боевые придумки, которыми давно пользуются игроки Battlefield. Благодаря DARPA американским военным будет доступно зрение Терминатора - в феврале 2015 представители агентства презентовали имплант, позволяющий проецировать на сетчатку носителя всю доступную информацию о видимом объекте. Подобное нововведение не полностью соответствует зрению Терминатора, который может включать приближение, выводить на сетчатку данные о температуре объекта, его удаленности; включать режимы ночного видения и инфракрасного зрения, но достаточно близко с ним соотносится. Интерфейсы взаимодействия «человек - робот»
Системы ввода/вывода, которыми оснащают промышленных и гражданских роботов, зависят от механизмов углубленного обучения (deep learning). Т-800, отличающийся дьявольски развитым логическим мышлением, всегда верно определяет ситуацию, в которой находится, способен лгать, изменять тональность голоса и строить планы иезуитской точности. Достичь уровня его осознанности пока не способен ни один сервисный робот. Робототехникам пришлось потратить много лет, чтобы спроектировать нелинейное взаимодействие человека и робота - чтобы последние могли принимать решения и представлять информацию, соотносясь с контекстом взаимодействия и статусом того, кто обращается за информацией. Интересный пример контекстного взаимодействия - проект ученых из Корнелльского университета, создавших платформу Tell Me Dave. На базе «Дейва» роботов обучают понимать непрямые команды и адаптироваться к контекстам взаимодействия. Как пишут сами ученые, «наша задача - сделать так, чтобы робот, получив простую инструкцию «сделай чашку кофе», смог понять, как залить в чашку молоко; как поступить, если молоко там уже есть», - в общем, справиться с ситуацией. Терминатор, делающий Джону Коннору «кофе как обычно», - предельный уровень отцовской заботы. Эндоскелет
Рука робонавта способна делать сложные движения; у нее 14 степеней свободы - отдельно двигается запястье, пальцы сгибаются в фалангах, способны сжиматься в кулак и показывать «победу» - совсем как человеческие
Изначальный облик Т-800 - металлический скелет с ужасающе ухмыляющимся черепом - Джеймс Кэмерон придумал еще до того, как взялся за написание сценария первого «Терминатора». Согласно Рэндаллу Фрейксу, разрабатывавшему историю вместе с Кэмероном, скелет Терминатора сделан из гиперсплава - металла куда более гибкого и прочного, нежели обычная сталь. В первой версии Т-800 не отличается грациозностью движений и обильно потеет (по одному из предположений, оттого что плоть отторгает металл и человеческая оболочка Т-800 постоянно воспалена). Но металлический каркас обходился без таких трудностей - ему не вредили ни прямые выстрелы из дробовика, ни лобовые столкновения с гигантскими автомобилями. Пожалуй, в первых версиях скелету недоставало грациозности; но уже с наступления «Судного дня» Терминатор стал значительно подвижнее. Рука Найджела способна проворачиваться на 360 градусов - она работает не так точно, как рука робонавта, и существенно облегчает домашние дела
Робонавт, разрабатывавшийся при участии Boston Dynamics для миссий NASA, отличается гибкостью, которая была бы к лицу Т-800, - рука, используемая для деликатных работ на космических кораблях, работает в широком температурном диапазоне и способна симулировать хватку человека практически в 90 процентах случаев. Есть воодушевляющий пример и из области медицинской роботехники - Найджел Экланд обзавелся рукой Bebionic в 2012 году и с тех пор регулярно участвует на конвентах по роботехнике; профильная пресса именует его Human 2.0, а он отлично управляется с протезом: бионической рукой он может рисовать, писать, пользоваться холодильником и даже открывать пивные банки. Найджел, в отличие от первой версии Т-800, редко покрывается каплями пота и обычно излучает добродушие. Питание
Робот «Атлант» освобожден потому, что носит с собой свою собственную зарядку
Лишь несколько существенных ограничений способны расстроить план по постройке Терминатора (не считая его некоторой старомодности и неуместности). В первую очередь - питание. В киновселенной вопрос подзарядки решается просто - киборг может 120 лет проработать на одной топливной ячейке, использующей изотопы иридия. Рэндел Флейкс, автор новелл по мотивам первого и второго фильмов, писал: «Терминатор может проработать 1095 дней в режиме постоянного включения 24 на 7. У него гарантированно будут случаться моменты экономии, когда потребление энергии падает на 40 процентов, а зрение переходит исключительно в инфракрасный режим». В реальности таких батареек с мощностью, достаточной для бодрого разгуливания, пока что не изобретено. Только в 2015 году разработанный студией Boston Dynamics человекоподобный робот «Атлант освобожденный» обзавелся портативным источником питания, позволяющим отключать его от проводного электричества. Демонстрация экзоскелетов реально существующей компании Cyberdyne
Впрочем, главное условие для постройки Терминатора уже выполнено. Компания Cyberdyne, которая по сюжету франшизы спроектировала Skynet, существует в действительности c 2004 года. Ее директор, доктор Санкай, разрабатывает экзоскелеты под названием Robot HAL, с удовольствием фотографируется с макетами Т-800 и знает - для создания эффективного робота можно обойтись и без харизматичного актера. Правда, он сознательно ограничивает рабочие интересы компании медицинскими и сервисными роботами, но в публичных интервью порой со знанием дела ссылается на название компании. Представляем вам простого, недорого и очень интересного робота Phoenix. Он относится к разряду боевых роботов, а значит, дожжен быть оснащен минимальным оружием. Робот популярный в Соединенных штатах, но, оказывается, принцип его действия и комплектация достаточно простые, чтобы построить в домашних условиях. В этой пошаговой инструкции мы ознакомим вас с особенностями создания этого робота и надеемся, что он вам понравится. Цена создания – около 700 долларов США. Максимальный вес робота – 30 фунтов Видеодемонстрация работы:
Шаг 1. Основа:
Этот боевой робот относится к BattleBots, но этот термин является товарным знаком, так что, возможно, не стоит его так называть. Посвятим вас вкратце об этих роботах. Основная идея заключается в двух роботах, которые борются до смерти в закрытом пространстве с бронированным стеклом в течение 3 минут, или пока никто не сможет двигаться больше, когда объявлен нокаут. Существуют три группы, на которые могут быть разделены все роботы. Spinners, вероятно, являются наиболее распространенными. У них есть некоторая вращающаяся масса, что-то вроде лезвия, с помощью которой они пытаются подрезать другого робота. Боевых ботов проще строить. Выигрывают те, кто доминируют в течение боя. Третья группа - это ласты или подъемники. Они разработаны, чтобы попасть в другого робота и перевернуть его, разбросав его по арене и не поломав ничего при ударе. Часто это делается с помощью пневматического оружия. Ласты не очень распространены, потому что введение дешевых импортных китайских бесщеточных двигателей вызывает трудности, связанные с пневматикой. Цели для создания робота Phoenix могут быть следующие:
Для того, чтобы построить этого робота, не нужны схемы, макеты и планы. Нужно разложить на полу необходимее компоненты и придумать собственный дизайн устройства. В данном случае речь идет о нашем оружии для робота, которое может быть в виде руки-ласты. Рука имеет толщину 25 дюймов и выполнена из алюминия. По своему принципу она полостью регулируемая. Титановая небольшая лопатка находится впереди, чтобы доставать противника. Рука-оружие: Пневматическая система без подъемного устройства и выпускного клапана 4-дюймовое орудие с 2,5 дюймовым отверстием Шаг 3. Рамка и трансмиссия:
Когда у вас уже есть оружие, можете приступить к созданию рамки (каркаса) для корпуса робота. Учтите, что каркас должен быть очень прочным, так как на нем будет держаться вся конструкция. Поэтому лучше для рамки использовать 1/2 х1/2 дюймовую стальную коробку. После сварки основных форм нужно еще раз проверить, соответствуют ли компоненты и их повторную работу, расположив их должным образом. Трансмиссия для Phoenix – это два 18 вольтные бурильные моторы Harbor Freight с 4-дюймовыми колесами и с одной батареей для питания. Эта трансмиссия предлагает адекватную скорость и силу для робота, к тому же она недорогая. Для регулировки скорости можно использовать контроллер Sabertooth 2X25. Сделав рамку и трансмиссию, можно выполнить первоначальное тестирование работы устройства. Если робот начинает работать абсолютно неуправляемо, значит, колесам не хватает необходимой нагрузки. Поэтому следует приварить ещё где-то 4 фунта стали на переднюю часть рамки, чтобы получился нормальный вес для колес. Дополнительным преимуществом здесь может быть 1/8 дюймовая стальная броня на передней части робота. Приводные двигатели на рамке, аккумулятор, ESC и RC-переключатель Шаг 4. Броня и сборка. Дополнительные тестирования:
Сочетая вес рамки, пневматику, трансмиссию и переднее оружие, броня должна быть легкой, но мощной. Для этого идеально подойдет материал титан. Он дорогой и, возможно, ударит по бюджету, но учитывая количество требуемого титана, стоимость выйдет в пределах нормы. Чтобы установить броню, нужно увеличить рамку. После расширения каркас сможет удерживать броню и защищать колеса. Броня для Phoenix состоит из трех частей. Стальная плата приваренная к передней части, а две титановые 1/16 дюймовые платы портативные и предоставляют доступ к внутренним деталям для зарядки батарей, заправки бака CО2 и ремонта робота в случае поломки. Phoenix имеет только 29 шурупа, с помощью которых легко собирать и разбирать робота, что очень важно для соревнований роботов. После сборки нужно снова проверить робота в действии, в основном из-за пневматики. Нужно найти оптимальный размер отверстия для того, чтобы робот смог перемещать тяжелые объекты. Здесь можно попробовать различные размеры, 1/16" и 1/32". 1/16" отверстие подойдет больше, потому что оно управляет оружием на протяжение длительного периода времени. Рамка с броней и 4 фунтовая стальная плата на передней части робота Шаг 5. Технические характеристики робота и проверка его в боевой деятельности:
Шаг 6. Заключение:
Таким образом, робот Phoenix является простой боевой машиной, которая не требует программирования и слишком дорогих материалов. Он может использоваться как дома для развлечения, так и принимать участие в различных соревнованиях между самодельными роботами.Заключение

Если же не хочется собирать действительно работающего Т-800, достаточно обзавестись качественной репликой, что и сделал Адам Сэвидж из «Разрушителей мифов»
Используемые материалы для робота:
Шаг 2. Рука-оружие:





Phoenix является вторым по рангу 30-фунтовым боевым роботом в США и Канаде. Его боевой рекорд – 7 побед и 3 поражений.