Инверторный частотный преобразователь своими руками. Изучаем принцип работы, собираем и подключаем частотный преобразователь для асинхронных двигателей
Асинхронные двигатели используются в промышленности для обеспечения работы различных механизмов. Но они имеют один существенный недостаток - при запуске происходит кратковременный скачок тока в пять–семь раз. Кроме потерь электроэнергии, промышленные механизмы терпят ударные нагрузки, что приводит к их преждевременному изнашиванию. Поэтому было разработан частотный преобразователь или инвертор, обеспечивающий плавный пуск и останов асинхронных двигателей.
Основы работы преобразователя
Преобразователь частоты не только обеспечивает плавный пуск-остановка двигателя , но и изменяет частоту вращения ротора , регулируя частоту напряжения на входе двигателя. При этом инверторы изменяют частоту в широком диапазоне от значения частоты питающей сети. В величина напряжения питания определяет частоту вращения магнитного поля, создаваемого статором. Обозначим частоту напряжения , тогда угловая скорость магнитного поля двигателя определяется следующей формулой:
где -число пар полюсов статора. Закон пропорциональности зависит от момента нагрузки. Если момент нагрузки постоянный, то напряжение на статоре регулируется по закону
Для вентиляторов применяется следующая зависимость:
 .
.
Если момент нагрузки обратно пропорционален скорости, то напряжение и частота связаны формулой:
По принципу управления преобразователи можно разделить на типы:
- со скалярным управлением;
- с векторным управлением.
 Принцип скалярного управления
заключается в управлении частотой питающего тока и силы этого
тока
. Скалярное управление предусматривает поддержание заданного соотношения частоты и напряжения при неизменном крутящемся моменте. Инвертор с управлением по скалярному принципу применяется для вентиляторов, компрессоров, насосов
. Допускается подключение к одному преобразователю несколько двигателей.
Принцип скалярного управления
заключается в управлении частотой питающего тока и силы этого
тока
. Скалярное управление предусматривает поддержание заданного соотношения частоты и напряжения при неизменном крутящемся моменте. Инвертор с управлением по скалярному принципу применяется для вентиляторов, компрессоров, насосов
. Допускается подключение к одному преобразователю несколько двигателей.
Скалярный режим позволяет осуществлять регулировку скорости двигателя в узком диапазоне и в среднем колеблется от 1Гц до 100Гц. Это означает, что инвертор преобразует частоту вращения электрического тока сети 50Гц на входе в частоту вращения электрического тока на выходе в диапазоне 1:100Гц .
Важной характеристикой частотных преобразователей является диапазон сохранения скорости с сохранением крутящего момента вала двигателя.
Принцип действия инвертора с векторным управлением заключается в управление характеристиками частоту, силы тока и фазы питающего тока. Так как вращение ротора отстает от вращения магнитного поля статора на 3-5% при максимальном КПД и соответственно максимальной мощности и крутящем моменте, то инвертор с векторным управлением регулирует вращение фазы магнитного поля статора по отношению к вращению ротора, так, чтобы оно было всегда впереди на 3-5%.
При использовании частотного преобразователя реализованного по векторному принципу необходимы датчики обратной связи , которые отслеживают положение ротора электродвигателя. С использованием датчиков диапазон регулирования скорости увеличивается и может достигать показаний выходного тока от 1Гц до 800Гц, что составляет диапазон 1:800Гц . Что актуально для регулирования скорости в лифтовых механизмах, станках.
Название «векторное управление» возникло из-за математического представления тока, создаваемого магнитным полем статора в виде вектора, величина которого равна величине тока, а координаты зависят от фазы тока. Кратко можно сказать, что при векторном режиме управления двигатель развивает максимальный момент тогда, когда вектор магнитного поля находится под углом 103 0 — 105 0 к электрическому току в обмотке ротора. Векторный режим обеспечивает постоянный момент вращения на малых скоростях, высокую точность управления и возможность быстро регулировать скорость изменением частоты.
В инверторе используется принцип преобразования напряжения сети в два этапа. На первом этапе переменное напряжение сети (220 В/380 В) выпрямляется, сглаживается с помощью диодов и конденсаторов. В итоге на первом этапе получается напряжение постоянного тока. На втором этапе формируются прямоугольные импульсы заданной частоты. Через транзисторы инвертора они поступают на обмотки статора, где под воздействием магнитного поля превращаются в синусоидальные, соответствующие переменному току.
Преобразователи с методом широтно-импульсной модуляции напряжения (ШИМ) формируют синусоидальную кривую, параметры которой определяют амплитуду и частоту напряжения.
![]()
Виды частотных преобразователей
По назначению преобразователи выпускаются для однофазного и трехфазного напряжения. По типу управления - со скалярным или векторным управлением, о чем рассказывали выше. По типу преобразования делятся на два вида:
- с автономным инвертором напряжения (АИН);
- автономным инвертором тока (АИТ).
Современная промышленность выпускает частотные преобразователи в широком ассортименте, разной мощности и с разными функциями.
Виды входной и выходной информации
Частотные преобразователи различаются по количеству входов и выходов. Входные(выходные) сигналы делятся на следующие типы, которые приведены в таблице 1.
Таблица 1
| Дискретные сигналы | Аналоговые сигналы | Цифровые сигналы | |||
| Входные | Выходные | Входные | Выходные | Входные | Выходные |
| Пуск | Готов | Задание частоты от систем управления или получение сигналов от датчиков | Для подключения к устройствам отображения информации | Передают информацию от датчиков положения и скорости. | Для передачи данных АСУ |
| Стоп | Работа | ||||
| Блокировка пуска | Отказ | ||||
| Торможение | |||||
| Реверс | |||||
| Выбор скорости | |||||
 Преобразователи частоты по способу подключения к сети делятся на однофазные и трехфазные. Однофазные частотники
подключаются к бытовой сети 220 В
, а на выходе формируют трехфазное напряжение. К двигателю они подключаются по схеме «треугольник»
. При этом необходимо, чтобы выходной ток составлял не больше половины номинального.
Преобразователи частоты по способу подключения к сети делятся на однофазные и трехфазные. Однофазные частотники
подключаются к бытовой сети 220 В
, а на выходе формируют трехфазное напряжение. К двигателю они подключаются по схеме «треугольник»
. При этом необходимо, чтобы выходной ток составлял не больше половины номинального.
Трехфазные инверторы подключаются к сети 380 В , подключение проводится по принципу «звезда» .
Частотный преобразователь на корпусе имеет ряд клемм для подключения с соответствующей маркировкой. Рассмотрим их обозначения и функции.
Отдельно имеются цифровые выходы для подключения к управляющей аппаратуре (АСУ). Количество выходов определяется производителем инверторов, подробнее они описаны в инструкции по эксплуатации на конкретную модель.
Основные правила выбора преобразователя
В зависимости от требований по мощности и типу управляемых механизмов подбирается частотный преобразователь.
- Мощность инвертора , указанная в документации, должна быть равной или больше механической мощности электродвигателя . Но при этом необходимо дополнительно ориентироваться на тип подключаемых механизмов. Для подъемных устройств выбирается преобразователь, имеющий величину мощности выше паспортного значения мощности двигателя. А для центробежного насоса допускается мощность инвертора ниже.
- Если подключаемая нагрузка отличается большой инерционностью , то в зависимости от требуемого времени разгона подбирается мощность преобразователя. Для быстрого разгона потребуется преобразователь с мощностью, больше номинальной мощности двигателя на 10-15% .
- При выборе частотника номинальный рабочий ток должен превышать значение номинального тока электродвигателя на 10% , чтобы не допустить блокировку по превышению тока.
Основным критерием выбора частотного преобразователя при невозможности одновременно удовлетворить требования по току и напряжению является выбор по полной номинальной мощности, которая должна превышать номинальную мощность двигателя.
При выборе инвертора нельзя обойти вниманием и количество входных (выходных) сигналов и их тип, что позволяет осуществлять автоматизацию производственным процессом и ее модернизацию. При этом желательно ориентироваться принципом - «входов много не бывает».
Как уже обсуждали, в первую очередь выбирается метод управления: скалярный или векторный. Скалярный способ используется для простых механизмов , где требуется обеспечение заданной скорости вращения (вентиляторы, компрессоры и т. д.), где не требуются датчики обратной связи . Векторное управление подразделяется на управление по напряжению и по току. При высоких требованиях к регулировке скорости (от 1:800) дополнительно предусмотрены специальные приводы. И есть необходимость ставить датчики обратной связи на вал
На использовании сигнала обратной связи основана работа ПИД — регулятора . ПИД — регулятор расшифровывается как пропорционально – интегрально — дифференциальный регулятор. Измеряется отклонение величины (скорости, напряжения) от уставки (заранее заданного отклонения) и управляющей системой формируется сигнал по корректировке с учетом статистической ошибки. Такая система используется при работе насосов, станков.

Использование преобразователя частоты позволяет обеспечить защиту двигателя от перегрузки (холостого хода), возникающих при сбое в работе присоединенных механизмов. При обнаружении перегрузки преобразователь формирует аварийный сигнал и выдает команду «Останов».
Дополнительная функция «Летящий пуск» позволяет осуществлять задержку пуска двигателя в зависимости от условий вращения, при перезапуске двигателя. Особенно это актуально для механизмов, допускающих вращение в одну или другую сторону.
Фильтр ЕМС уменьшает электромагнитные помехи , обеспечивая защиту преобразователя и машин, чувствительных к помехам.
Среди функций защиты системы преобразователь - двигатель перечислим основные, которые осуществляются с помощью частотника:
- от перегрузки по току;
- от перегрева;
- от замыкания выходных фаз;
- от перенапряжения;
- от неисправностей в системе питания.
Разные производители оснащают инверторы различными дополнительными функциями по согласованию с заказчиком. Поэтому выбор частотного преобразователя определяется подключаемым оборудованием и задачами, выполнение которых должна обеспечивать система преобразователь - двигатель.
На рынке современной энергетики, электромонтёрам приходилось применять для подключения асинхронного двигателя стартовый или фазосдвигающий конденсатор большой ёмкости.
Двигатель при этом работал, но существенно терял мощность. Также, применение конденсаторов сильно разогревало обмотки двигателя, что сильно снижало его ресурс работы, и двигатели часто приходилось «перематывать». Учитывая, что обмотки асинхронного двигателя делаются из медной проволоки, то такие ремонты приносили большой ущерб.
Так как асинхронный двигатель является составной частью почти каждого современного привода, то вопрос создания частотного регулирования вставал на особый уровень. И вот, частотники уже повсеместно применяются для подключения электрического двигателя к сети и его управление.
По сути, частотный инвертор, это прибор, изменяющий частоту поданного на обмотки напряжения с ШИМ-регулированием. Благодаря частотнику, получилось подключить асинхронный двигатель к сети без ущерба его ресурсу, без перегрева, и ещё дать массу возможностей по управлению скоростью вращения вала.
Также, применяя различные интерфейсы передачи данных и команд, применение частотников позволило объединить все приводы большого предприятия в одно диспетчерскую систему управления и контроля параметров.
В мир современной автоматизации технологических процессов, это весомый аргумент.
Современный частотный инвертер состоит из двух принципиальных блоков. Первый блок полностью сглаживает напряжение и на выходе выдаёт постоянное. Постоянное напряжение подаётся на силовой блок генерации частоты. После преобразования, на выходе из второго блока частота напряжения уже будет такая, какая задана настройкой.
За возможность изменять частоту напряжения отвечает микропроцессор, который встроен в частотник. Используя заданную программу, процессор следит за выходной частотой напряжения, а также за параметрами работы электрического двигателя.

По сути, частотные преобразователи для асинхронных двигателей принцип работы которых заключён в простом вырабатывании нужной частоты переменного тока, это модуляторы нужной природы напряжения, которая необходима для того или иного оборудования. Именно это и снизило негативное влияние на работу электрического двигателя, которое имело место быть при использовании конденсатов.
Электрический двигатель получает именно такое напряжение, которое положено ему для нормальной и полноценной работы.
Считаем нужным отметить, что и при наличии линии трёхфазного напряжения, не всегда рационально подключать электрический двигатель к сети просто через выключатель. В таком случае, двигатель будет работать, но регулировать его работу не получится. Не получится и следить за состоянием обмоток.
В промышленном исполнении можно встретить два основных типа :
- Специальные.
- Универсальные.

Специальный частотный преобразователь для асинхронного двигателя, схема которого несколько отличается от универсального, изготавливается под конкретное оборудование по конкретным потребностям. Как правило, это очень урезанные версии, не способные на работу с любым оборудованием.
Универсальные частотные инвертера могут работать, как и в специальном оборудовании, так и во всех остальных вариантах применения. На то они и универсальные, что их можно настраивать и программировать под любые нужды.
Поэтому, выбор для асинхронного двигателя должен быть не столько продиктован конкретными необходимостями производства, но и возможностью модернизации оборудования.

Практически во всех частотниках сегодня реализована возможность установки и контроля режима работы электрического двигателя с пульта управления. Первый интерфейс управления встроен в сам корпус частотника. Там же есть и ручка регулирования скорости вращения двигателя.
Но можно и применять выносные пульты управления. Которые можно располагать как в диспетчерской, так и непосредственно на станке, который приводится в движение электрическим двигателем.
Такое чаще встречается в ситуациях, когда станок с двигателем находится в помещении, где не рекомендуется установка частотного инвертора. И его устанавливают вдали от оборудования.
Большая часть инвертеров частоты позволяют программировать работу оборудования. Но, задать программу просто с пульта управления не получится. Для этого используется интерфейс передачи данных и настройки, который, при помощи компьютера позволяет задать нужную программу работы.

Разница типов сигналов управления
При проектировании цеха очень важно учитывать, что общение частотных преобразователей с диспетчерским пультом будет происходить при помощи электрических импульсов по проводам связи. Пи этом, не стоит забывать, что разные стандарты связи по-разному влияют друг на друга. Посему, переда данных одним способом, может существенно снижать качество передачи данных другим способом.
Поэтому, расчет частотного преобразователя для асинхронного двигателя должен производиться не только по его электротехническим показателям, но и по показателям совместимости с сетью.
Вопрос мощности частотника, скорее всего, стоит на первом плане, при расчете привода для любого станка или агрегата. Дело в том, что большинство частотных инвертеров способны выдерживать большие перегрузки до 200 – 300 %. Но, это совсем не означает, что для питания электрического двигателя можно смело покупать частотник сегментом ниже, чем требуется по планированию.
Выбор осуществляется с обязательным запасом в 20 – 30%. Игнорирование этого правила может повлечь за собой выход из строя частотного преобразователя и простой оборудования.

Также важно учитывать пиковые нагрузки, которые может выдерживать частотник. Дело в том, что при старте электрического двигателя его пусковые токи могут сильно превышать номинальные. В некоторых случаях, пусковой ток превышает номинальный в шесть раз! Частотик должен быть рассчитан на такие изменения.
Каждый электрический двигатель оборудован вентилятором охлаждения. Это лопасти, которые установлены в задней части двигателя и по мере вращения вала прогоняют через корпус мотора воздух.
Если электрический двигатель работает на пониженных оборотах, то мощности потока воздуха может не хватить для охлаждения.
В этом случае, нужно выбирать частотник с датчиками температуры двигателя. Или организовать дополнительное охлаждение.

Электромагнитная совместимость преобразователей частоты
При расчёте и к сети и электрическому двигателю, следует помнить, что он очень подвержен помехам. Также, преобразователь частоты может и сам стать источником помех для другого оборудования. Именно поэтому, все подключения к частотнику и от него выполняются экранированными кабелями и выдерживанием дистанции в 10 см друг от друга.

По своей сути, применение частного преобразователя для питания асинхронного электрического двигателя позволило существенно продлить жизнь электрического двигателя, дало возможность регулировать работу двигателя и хорошо экономить на расходе электрической энергии.
Одна из первых схем преобразователя для питания трехфазного двигателя была опубликована в журнале «Радио» №11 1999г. Разработчик схемы М. Мухин в то время был учеником 10 класса и занимался в радиокружке.
Преобразователь предназначался для питания миниатюрного трехфазного двигателя ДИД-5ТА, который использовался в станке для сверления печатных плат. При этом следует отметить, что рабочая частота этого двигателя 400Гц, а напряжение питания 27В. Кроме того, средняя точка двигателя (при соединении обмоток «звездой») выведена наружу, что позволило предельно упростить схему: понадобилось всего три выходных сигнала, а на каждую фазу потребовался всего один выходной ключ. Схема генератора показана на рисунке 1.
Как видно из схемы преобразователь состоит из трех частей: генератора-формирователя импульсов трехфазной последовательности на микросхемах DD1…DD3, трех ключей на составных транзисторах (VT1…VT6) и собственно электродвигателя M1.
На рисунке 2 показаны временные диаграммы импульсов, сформированных генератором-формирователем. Задающий генератор выполнен на микросхеме DD1. С помощью резистора R2 можно установить требуемую частоту вращения двигателя, а также изменять ее в некоторых пределах. Более подробную информацию о схеме можно узнать в указанном выше журнале. Следует отметить, что по современной терминологии подобные генераторы-формирователи называются контроллерами.

Рисунок 1.

Рисунок 2. Временные диаграммы импульсов генератора.
На базе рассмотренного контроллера А. Дубровским из г. Новополоцка Витебской обл. была разработана конструкция частотно-регулируемого привода для двигателя с питанием от сети переменного тока напряжением 220В. Схема устройства была опубликована в журнале «Радио» 2001г. №4.
В этой схеме, практически без изменений, используется только что рассмотренный контроллер по схеме М. Мухина. Выходные сигналы с элементов DD3.2, DD3.3 и DD3.4 используются для управления выходными ключами A1, A2, и A3, к которым подключается электродвигатель. На схеме полностью показан ключ A1, остальные идентичны. Полностью схема устройства показана на рисунке 3.

Рисунок 3.
Для ознакомления с подключением двигателя к выходным ключам стоит рассмотреть упрощенную схему, приведенную на рисунке 4.

Рисунок 4.
На рисунке показан электродвигатель M, управляемый ключами V1…V6. Полупроводниковые элементы для упрощения схемы показаны в виде механических контактов. Питание электродвигателя осуществляется постоянным напряжением Ud получаемым от выпрямителя (на рисунке не показан). При этом, ключи V1, V3, V5 называются верхними, а ключи V2, V4, V6 нижними.
Совершенно очевидно, что открытие одновременно верхних и нижних ключей, а именно парами V1&V6, V3&V6, V5&V2 совершенно недопустимо: произойдет короткое замыкание. Поэтому, для нормальной работы такой ключевой схемы, обязательно, чтобы к моменту открытия нижнего ключа верхний ключ уже был закрыт. С этой целью контроллеры управления формируют паузу, часто называемую «мертвой зоной».
Величина этой паузы такова, чтобы обеспечить гарантированное закрытие силовых транзисторов. Если эта пауза будет недостаточна, то возможно кратковременное открытие верхнего и нижнего ключа одновременно. Это вызывает нагрев выходных транзисторов, часто приводящий к выходу их из строя. Такую ситуацию называют сквозными токами.
Вернемся к схеме, показанной на рисунке 3. В данном случае верхними ключами являются транзисторы 1VT3, а нижними 1VT6. Нетрудно заметить, что нижние ключи гальванически связаны с управляющим устройством и межу собой. Поэтому управляющий сигнал с выхода 3 элемента DD3.2 через резисторы 1R1 и 1R3 подаются непосредственно на базу составного транзистора 1VT4…1VT5. Этот составной транзистор есть не что иное, как драйвер нижнего ключа. В точности также от элементов DD3, DD4 управляются составные транзисторы драйверов нижнего ключа каналов A2 и A3. Питание всех трех каналов осуществляется от одного и того же выпрямителя VD2.
Верхние же ключи гальванической связи с общим проводом и управляющим устройством не имеют, поэтому для управления ими кроме драйвера на составном транзисторе 1VT1…1VT2 пришлось в каждый канал установить дополнительный оптрон 1U1. Выходной транзистор оптрона в этой схеме также выполняет функцию дополнительного инвертора: когда на выходе 3 элемента DD3.2 высокий уровень открыт транзистор верхнего ключа 1VT3.
Для питания каждого драйвера верхнего ключа используется отдельный выпрямитель 1VD1, 1C1. Каждый выпрямитель питается от индивидуальной обмотки трансформатора, что можно рассматривать как недостаток схемы.
Конденсатор 1C2 обеспечивает задержку переключения ключей около 100 микросекунд, столько же дает оптрон 1U1, тем самым формируется вышеупомянутая «мертвая зона».
Достаточно ли только регулирования частоты?
С понижением частоты питающего переменного напряжения падает индуктивное сопротивление обмоток двигателя (достаточно вспомнить формулу индуктивного сопротивления), что приводит к увеличению тока через обмотки, и, как следствие, к перегреву обмоток. Также происходит насыщение магнитопровода статора. Чтобы избежать этих негативных последствий, при уменьшении частоты приходится снижать и эффективное значение напряжения на обмотках двигателя.
Одним из способов решения проблемы в любительских частотниках предлагалось это самое эффективное значение регулировать при помощи ЛАТРа, подвижный контакт которого имел механическую связь с переменным резистором регулятора частоты. Такой способ был рекомендован в статье С. Калугина «Доработка регулятора частоты вращения трехфазных асинхронных двигателей». Журнал «Радио» 2002, №3, стр.31.
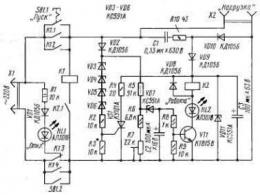
В любительских условиях механический узел получался в изготовлении сложным, а главное ненадежным. Более простой и надежный способ использования автотрансформатора был предложен Э. Мурадханяном из Еревана в журнале «Радио» №12 2004. Схема этого устройства показана на рисунках 5 и 6.
Напряжение сети 220В подается на автотрансформатор T1, а с его подвижного контакта на выпрямительный мост VD1 с фильтром C1, L1, C2. На выходе фильтра получается изменяемое постоянное напряжение Uрег, используемое собственно для питания двигателя.

Рисунок 5.
Напряжение Uрег через резистор R1 также подается на задающий генератор DA1, выполненный на микросхеме КР1006ВИ1 (импортный вариант ). В результате такого подключения обычный генератор прямоугольных импульсов превращается в ГУН (генератор, управляемый напряжением). Поэтому, при увеличении напряжения Uрег увеличивается и частота генератора DA1, что приводит к увеличению частоты вращения двигателя. При снижении напряжения Uрег пропорционально уменьшается и частота задающего генератора, что позволяет избежать перегрев обмоток и перенасыщение магнитопровода статора.

Рисунок 6.

Рисунок 7.
Генератор выполнен на втором триггере микросхемы DD3, на схеме обозначен как DD3.2. Частота задается конденсатором C1, регулировка частоты осуществляется переменным резистором R2. Вместе с регулировкой частоты изменяется и длительность импульса на выходе генератора: при понижении частоты длительность уменьшается, поэтому напряжение на обмотках двигателя падает. Такой принцип управления называется широтно импульсной модуляцией (ШИМ).
В рассматриваемой любительской схеме мощность двигателя невелика, питание двигателя производится прямоугольными импульсами, поэтому ШИМ достаточно примитивна. В реальных большой мощности ШИМ предназначена для формирования на выходе напряжений практически синусоидальной формы, как показано на рисунке 8, и для реализации работы с различными нагрузками: при постоянном моменте, при постоянной мощности и при вентиляторной нагрузке.

Рисунок 8. Форма выходного напряжения одной фазы трехфазного инвертора с ШИМ.
Силовая часть схемы
Современные фирменные частотники имеют на выходе , специально предназначенные для работы в преобразователях частоты. В ряде случаев эти транзисторы объединены в модули, что в целом улучшает показатели всей конструкции. Управление этими транзисторами производится с помощью специализированных микросхем-драйверов. В некоторых моделях драйверы выпускаются встроенными в транзисторные модули.
Наиболее распространены в настоящее время микросхемы и транзисторы фирмы International Rectifier. В описываемой схеме вполне возможно применить драйверы IR2130 или IR2132. В одном корпусе такой микросхемы содержится сразу шесть драйверов: три для нижнего ключа и три для верхнего, что позволяет легко собрать трехфазный мостовой выходной каскад. Кроме основной функции эти драйверы содержат также несколько дополнительных, например защита от перегрузок и коротких замыканий. Более подробную информацию об этих драйверах можно узнать из технических описаний Data Sheet на соответствующие микросхемы.
При всех достоинствах единственный недостаток этих микросхем их высокая цена, поэтому автор конструкции пошел другим, более простым, дешевым, и в то же время работоспособным путем: специализированные микросхемы-драйверы заменены микросхемами интегрального таймера КР1006ВИ1 (NE555).
Выходные ключи на интегральных таймерах
Если вернуться к рисунку 6, то можно заметить, что схема имеет для каждой из трех фаз выходные сигналы, обозначенные как «Н» и «В». Наличие этих сигналов позволяет раздельно управлять верхними и нижними ключами. Такое разделение позволяет формировать паузу между переключением верхних и нижних ключей при помощи блока управления, а не самими ключами, как было показано в схеме на рисунке 3.
Схема выходных ключей с применением микросхем КР1006ВИ1 (NE555) показана на рисунке 9. Естественно, что для трехфазного преобразователя понадобится три экземпляра таких ключей.

Рисунок 9.
В качестве драйверов верхних (VT1) и нижних (VT2) ключей используются микросхемы КР1006ВИ1, включенные по схеме триггеров Шмидта. С их помощью возможно получить импульсный ток затвора не менее 200мА, что позволяет получить достаточно надежное и быстрое управление выходными транзисторами.
Микросхемы нижних ключей DA2 имеют гальваническую связь с источником питания +12В и, соответственно, с блоком управления, поэтому их питание осуществляется от этого источника. Микросхемы верхних ключей можно запитать так же, как было показано на рисунке 3 с использованием дополнительных выпрямителей и отдельных обмоток на трансформаторе. Но в данной схеме применяется иной, так называемый, «бустрепный» метод питания, смысл которого в следующем. Микросхема DA1 получает питание от электролитического конденсатора C1, заряд которого происходит по цепи: +12В, VD1, C1, открытый транзистор VT2 (через электроды сток - исток), «общий».
Другими словами заряд конденсатора C1 происходит в то время, когда открыт транзистор нижнего ключа. В этот момент минусовой вывод конденсатора С1 оказывается практически накоротко соединен с общим проводом (сопротивление открытого участка «сток - исток» у мощных полевых транзисторов составляет тысячные доли Ома!), что и обеспечивает возможность его заряда.
При закрытом транзисторе VT2 также закроется и диод VD1, заряд конденсатора C1 прекратится до следующего открытия транзистора VT2. Но заряд конденсатора C1 достаточен для питания микросхемы DA1 на время, пока закрыт транзистор VT2. Естественно, что в этот момент транзистор верхнего ключа находится в закрытом состоянии. Данная схема силовых ключей оказалась настолько хороша, что без изменений применяется и в других любительских конструкциях.
В данной статье рассмотрены лишь самые простые схемы любительских трехфазных инверторов на микросхемах малой и средней степени интеграции, с которых все начиналось, и где можно даже по схеме рассмотреть все «изнутри». Более современные конструкции выполнены , схемы которых также неоднократно публиковались в журналах «Радио».
Микроконтроллерные блоки управления по схеме более просты, чем на микросхемах средней степени интеграции, имеют такие нужные функции, как , защита от перегрузок и коротких замыканий и некоторые другие. В этих блоках все реализовано за счет управляющих программ или как их принято называть «прошивок». Именно от этих программ и зависит насколько хорошо или плохо будет работать блок управления трехфазного инвертора.
Достаточно простые схемы контроллеров трехфазного инвертора опубликованы в журнале «Радио» 2008 №12. Статья называется «Задающий генератор для трехфазного инвертора». Автор статьи А. Долгий является также автором цикла статей о микроконтроллерах и многих других конструкций. В статье приведены две простых схемы на микроконтроллерах PIC12F629 и PIC16F628.
Частота вращения в обеих схемах изменяется ступенчато с помощью однополюсных переключателей, что вполне достаточно во многих практических случаях. Там же дается ссылка где можно скачать готовые «прошивки», и, более того, специальную программу, с помощью которой можно изменять параметры «прошивок» по своему усмотрению. Возможна также работа генераторов режиме «демо». В этом режиме частота генератора уменьшена в 32 раза, что позволяет визуально с помощью светодиодов наблюдать работу генераторов. Также даются рекомендации по подключению силовой части.
Но, если не хочется заниматься программированием микроконтроллера фирма Motorola выпустила специализированный интеллектуальный контроллер MC3PHAC, предназначенный для систем управления 3-фазным двигателем. На его базе возможно создание недорогих систем регулируемого трехфазного привода, содержащего все необходимые функции для управления и защиты. Подобные микроконтроллеры находят все более широкое применение в различной бытовой технике, например, в посудомоечных машинах или холодильниках.
В комплекте с контроллером MC3PHAC возможно использование готовых силовых модулей, например IRAMS10UP60A разработанных фирмой International Rectifier. Модули содержат шесть силовых ключей и схему управления. Более подробно с этими элементами можно в их документации Data Sheet, которую достаточно просто найти в интернете.
Асинхронные двигатели – устройства, наиболее часто применяемые в промышленности.
{ ArticleToC: enabled=yes }
Для плавного запуска пользуются частотными преобразователями, способными контролировать ток пусковой и позволяющие регулировать скорость вращения. Но, важно понимать, что частотный преобразователь для однофазного электродвигателя отличается от того, который требуется трехфазному.

Асинхронные моторы в сравнении с иными электрическими машинами более мощные и производительные, но имеющие такой недостаток, как необходимость оснащения дополнительными элементами, отвечающими за скорость вращения ротора.
Также обстоят дела с пусковым током, который в 5-7 раз превышает номинальный, из-за чего ударные нагрузки приводят к потере энергии и все вместе сокращает его срок службы.
Для борьбы с этими проблемами существует класс приборов, автоматически контролирующий пусковые токи. Называются они частотными преобразователями.
С их помощью удается в 5 раз уменьшить пусковые токи, осуществив плавный запуск.
Кроме этого, регулируя частоты с напряжением, управляют ротором.
Помимо этих достоинств, применение таких приборов имеет следующие:
- во момент пуска экономится до 50% энергии;
- с их помощью осуществляется между смежными проводниками обратная связь. Их
- можно назвать генераторами трехфазного напряжения нужного значения и частоты.
В их основе лежит инвертор двойного преобразования.
Принцип функционирования заключен в следующем:
- вначале входной ток входной синусоидальный 220 или 380в выпрямляется, проходя диодный мостик;
- после этого, он поступает на конденсаторную группу, где сглаживается; пройдя через конденсаторы, он подается на управляющие микросхемы и биполярный БТИ транзистор, точнее мостовые ключи, где из него формируют заданных параметров широтно-импульсную трехфазную последовательность;
- полученные импульсы, имеющие форму прямоугольника, под воздействием индуктивности обмоток превращаются на выходе в синусоидальное напряжение.
Ниже приведена схема, позволяющая понять, как работает частотный преобразователь:

Выбор преобразователей частотных
Для производителей этих устройств, чтобы завоевать рынок, важна цена, как и для любого электронного оборудования. Чтобы ее снизить, ими создаются приборы, у которых набор функций минимален, т.е. чем дороже стоит частотный преобразователь, тем прибор универсальнее, что важно для потребителя, желающего продлить срок службы двигателя.
Основные критерии выбора
К ним относятся:
- управление . По этому показателю преобразователи частотные подразделяются на скалярные и векторные, которые чаще встречаются, но стоят дороже. Объясняется это тем, что они способны обеспечить более высокоточную регулировку, которую не могут дать первые. Скалярные же могут только удерживать заданное соотношение напряжения на выходе и частоты. Их поэтому ставят в приборы с невысокой нагрузкой на мотор;
- мощность. Понятно, что чем этот параметр больше, тем лучше. Но, помимо цифры, важен производитель: оборудование, находящееся в «близком родстве» работает намного эффективнее.Помимо этого, использование однобрендовых преобразователей важен для взаимозаменяемости;
- напряжение сети. Чтобы защитить устройства от скачков напряжения, которые нередко случаются в отечественных сетях, желательно, чтобы напряжение имело большой рабочий диапазон;
- диапазон регулировки частоты. Здесь исходят из требований конкретного устройства. На практике применяют преобразователи с частотой 10-100 Герц; дискретные входы. Они предназначены для передачи команд. Также благодаря им обеспечивается запуск двигателя и остановка, вращение в обратном направлении и торможение;
- аналоговые входы. Благодаря им осуществляют контроль при рабочем двигателе и настройку привода;
- цифровые. Их назначение – передача высокочастотных сигналов, которые генерируются датчиками угла поворота. Чем входов больше, тем это лучше, но дороже прибор;
- помимо входов , важны дискретные выходы, с которых сигнал сообщает о возникших неисправностях (перегреве, авариях, отклонении напряжения на входе от нормы и пр.);
- выходы аналоговые отвечают за передачу обратной связи. Их выбирают по выше описанному принципу;
- у шины управления число входов и выходов совпадать должно со схемой преобразователя. Но, лучше, если у нее будет запас, который может понадобиться при усовершенствовании устройства;
- перегрузочная способность. Нормальным считается, когда мощность частотного преобразователя больше на 10-15%, чем у двигателя. Выше, чем номинальный, должен быть у него и ток.

Их выпускают мощностью 5-10 Вт. Этого достаточно для работы центрифуг, бытовых холодильников, стиральных машин, станков обрабатывающих и пр. Характеристики технические у них хуже, в сравнении с трехфазными:
Мощность составляет всего 70% от трехфазного, ниже и перегрузочная способность.

На статоре АД расположены обмотки — основная и пусковая. Последнюю используют при запуске короткозамкнутого ротора «беличье колесо».

Чтобы понять, зачем необходима обмотка пусковая, обратимся к примеру: мотор соединен лишь с рабочей обмоткой (220В).
В ней I1(однофазный ток) создает магнитное пульсирующее поле. Его можно разложить на два – с одинаковой амплитудой и скоростями вращения, но противоположно направленных — Фа и Фв. При неподвижном роторе эти поля создают моменты крутящие М1 и М2 отличные по знаку, но равные по величине.
Результирующий пусковой момент равен нулю (Мn= M1 – M2), т.е. мотор не сможет вращаться без приложения к валу нагрузки.
Поэтому и требуется пусковая обмотка. Создаваемое ею поле заставляет вращаться мотор. Направление вращения определяет пусковой начальный момент.

Электрический двигатель — это машина, преобразующая электрическую энергию в механическую, благодаря которой в движение приводятся механизмы. При обратном преобразовании энергии эти устройства выступают в роли генератора. Ротор (вращающийся) и статор (неподвижный) — основные компоненты электродвигателей.

Для создания вращающегося поля требуется две обмотки на статоре, смещенные в пространстве под определенным углом. Пусковая укладывается на статор в соответствие с этим со смещением относительно рабочей в 90 градусов. Чтобы обеспечить сдвиг токов, при подключении ее к сети используют фазосдвигающий элемент – катушку, конденсатор или активный резистор.
Когда по проводнику течет ток, создается магнитное поле, действующее на него с силой F. Если проводник изогнуть в рамку и поместить в магнитное поле, две стороны, находящиеся под углом 90 градусов к полю, испытают действие такой же силы, но направленной в противоположную сторону, которые и создают крутящий момент.



Нужен малогабаритный однофазный частотный преобразователь, чтобы осуществлять управление мотором асинхронными с конденсаторным пуском (АИРЕ, АВЕ и пр.)
Устанавливают такие моторы в вентиляторах электрических, моечных машинах, холодильниках и т.д.
На сайте http://xn--80aqahnfuib9b.xn--p1ai/esq_A200.html можно посмотреть все характеристики устройства. Здесь же его можно купить, определившись по таблице с моделью.
| Модель | Ток, А | Мощность, кВт | Габариты (ВхШхГ) | Вес, кг | Цена, руб с НДС |
| Серия ESQ-А200, однофазные 1/1 фаза, 200-260 В (для однофазных электродвигателей) | |||||
| Преобразователь частоты ESQ-A200-2S0007 для однофазного двигателя 0,75 кВт | 4,7 | 0,75 | 141x85x113 | 1,1 | 14 338 |
| Преобразователь частоты ESQ-A200-2S0015 для однофазного двигателя 1,5 кВт | 7,5 | 1,5 | 141x85x113 | 1,2 | 13 874 |
| Преобразователь частоты ESQ-A200-2S0022 для однофазного двигателя 2,2 кВт | 10 | 2,2 | 170x125x113 | 2 | 19 007 |

В интернет-магазине http://npf-oberon.com.ua/index.php?route=product/product&path=59_63_65&product_id=62/ его стоимость 170 долларов . Там же ознакомиться можно с характеристиками.
Используют его для управления моторами, установленными в сельскохозяйственном оборудовании, транспортерах, миксерах, мощных насосах.
Огромный выбор одно- и трехфазных преобразователей разных производителей на сайте https://chastotnik.com.ua/preobrasovateli//p5 .
Чтобы сказать лучше ли однофазный преобразователь частотный или трехфазный, нужно четко знать для чего он требуется. В однофазных моторах они нужны для управления и регулирования. Переменное напряжение такими преобразователями частотными преобразуется в импульсное, у которого частота 0-1000 колеб./сек. Скорость, с которой вращается ротор асинхронного мотора, получающий напряжение синусоидальное, при этом, меняется пропорционально частоте такого питания.

Отличается частотный преобразователь для электродвигателя 380 от моторов, работающих от бытовой сети, напряжением, подаваемым на инвертор. Частота трехфазного напряжения на выходе лежит в диапазоне 0-1 кГц.
От него в дальнейшем питается мотор, т.е. такой преобразователь позволяет привод запитывать от бытовой сети, одновременно регулирует его характеристики.

Сегодня такие приборы используют редко, поскольку на смену им пришли трехфазные преобразователи частотные, у которых намного шире возможности. Трехфазный частотный преобразователь для трехфазного электродвигателя способен преобразовывать промышленное напряжение сети (трехфазное).
Их к асинхронному двигателю подключают «звездой», а однофазные – «треугольником», т.е регулируют они большее число параметров, что дает возможность выбрать оптимальный режим.

У них значительно меньше габариты и большие функциональные возможности, высокие показатели долговечности и надежности, вполне приемлемая стоимость.
Видео: Частотный преобразователь. Подключение трехфазного двигателя в однофазную сеть 220В.
Добавить тегЧастотный преобразователь
Всем здравствуйте. Вот решил написать статейку про асинхронный привод и преобразователь частоты, который я изготавливал. Моему товарищу надо было крутить пилораму, и крутить хорошо. А сам я занимался импульсной электроникой и сразу предложил ему частотник. Да, можно было купить фирмовый преобразователь, и мне приходилось с ними сталкиваться, параметрировать, но захотелось своего, САМОДЕЛАШНОГО! Да и привод циркулярки к качеству регулирования скорости не критичен, только вот к ударным нагрузкам и к работе в перегрузе должен быть готов. Также максимально-простое управление с помощью пары кнопок и никаких там параметров.
Основные достоинства частотнорегулируемого привода (может для кого-то повторюсь):
Формируем из одной фазы 220В полноценные 3 фазы 220В со сдвигом 120 град., и имеем полный вращающий момент и мощность на валу.
Увеличенный пусковой момент и плавный пуск без большого пускового тока
Отсутствует замагничивание и лишний нагрев двигателя, как при использовании конденсаторов.
Возможность легко регулировать скорость и направление, если необходимо.
Вот какая схемка собралась:
3-фазный мост на IGBT транзисторах c обратными диодами (использовал имеющиеся G4PH50UD) управляется через оптодрайвера HCPL 3120 (бутстрепная схема запитки) микроконтроллером PIC16F628A. На входе гасящий конденсатор для плавного заряда электролитов DC звена. Затем его шунтирует реле и на микроконтроллер одновременно приходит логический уровень готовности. Также имеется триггер токовой защиты от к.з. и сильной перегрузки двигателя. Управление осуществляют 2 кнопки и тумблер изменения направления вращения.
Силовая часть мною была собрана навесным монтажом. Плата контроллера отутюжина вот в таком виде:

Параллельные резисторы по 270к на проходных затворных конденсаторах (забыл под них места нарисовать) припаял сзади платы, потом хотел заменить на смд но так и оставил.
Есть внешний вид этой платы, когда уже спаивал:

С другой стороны

Для питания управления был собран типовой импульсный обратноходовой (FLAYBACK) блок питания.
Его схема:

Можно использовать любой блок питания на 24В, но стабилизированный и с запаздыванием пропадания выходного напряжения от момента пропажи сетевого на пару тройку секунд. Это необходимо чтобы привод успел отключиться по ошибке DC. Добивался установкой электролита С1 большей ёмкости.
Теперь о самом главном...о програме микроконтроллера. Программирование простых моргалок для меня сложности не представляло, но тут надо было поднатужить мозги. Порыскав в нете, я не нашёл на то время подходящей информации. Мне предлагали поставить и специализированные контроллеры, например контроллер фирмы MOTOROLA MC3PHAC. Но хотелось, повторюсь, своего. Принялся детально разбираться с ШИМ модуляцией, как и когда нужно открыть какой транзистор... Открылись некие закономерности и вышел шаблон самой простой программы отработки задержек, с помощью которой можно выдать удовлетворительно синусовую ШИМ и регулировать напряжение. Считать ничего контроллер конечно не успевал, прерывания не давали что надо и поэтому я идею крутого обсчёта ШИМ на PIC16F628A сразу отбросил. В итоге получилась матрица констант, которую отрабатывал контроллер. Они задавали и частоту и напряжение. Возился честно скажу, долго. Пилорама уже во всю пилила конденсаторами, когда вышла первая версия прошивки. Проверял всю схему сначала на 180 ватном движке вентиляторе. Вот как выглядела "экспериментальная установка":

Первые эксперименты показали, что у этого проекта точно есть будущее.
Программа дорабатывалась и в итоге после раскрутки 4кВТ-ного движка её можно было собирать и идти на лесопилку.
Товарищ был приятно удивлён, хоть и с самого начала относился скептически. Я тоже был удивлён, т.к. проверилась защита от к.з. (случайно произошло в борно двигателя). Всё осталось живо. Двигатель на 1,5кВт 1440об/мин легко грыз брусы диском на 300мм. Шкивы один к одному. При ударах и сучках свет слегка пригасал, но двигатель не останавливался. Ещё пришлось сильно подтягивать ремень, т.к. скользил при сильной нагрузке. Потом поставили двойную передачу.
Сейчас ещё дорабатываю программу она станет еще лучше, алгоритм работы шим чуть сложнее, режимов больше, возможность раскручиваться выше номинала...а тут снизу та самая простая версия которая работает на пиле уже около года.
Её характеристики:
Выходная Частота: 2,5-50Гц, шаг 1,25Гц; Частота ШИМ синхронная, изменяющаяся. Диапазон примерно 1700-3300Гц.; Скалярный режим управления U/F, мощность двигателя до 4кВт.
Минимальная рабочая частота после однократного нажатия на кнопку ПУСК(RUN) - 10Гц.
При удержании кнопки RUN происходит разгон, при отпускании частота остаётся та, до которой успел разогнаться. Максимальная 50Гц- сигнализируется светодиодом. Время разгона около 2с.
Светодиод "готовность" сигнализирует о готовности к запуску привода.
Реверс опрашивается в состоянии готовности.
Режимов торможения и регулирования частоты вниз нет, но они в данном случае и не нужны.
При нажатии Стоп или СБРОС происходит остановка выбегом.
На этом пока всё. Спасибо, кто дочитал до конца.
|
Как вам эта статья? |